B355 Robotics
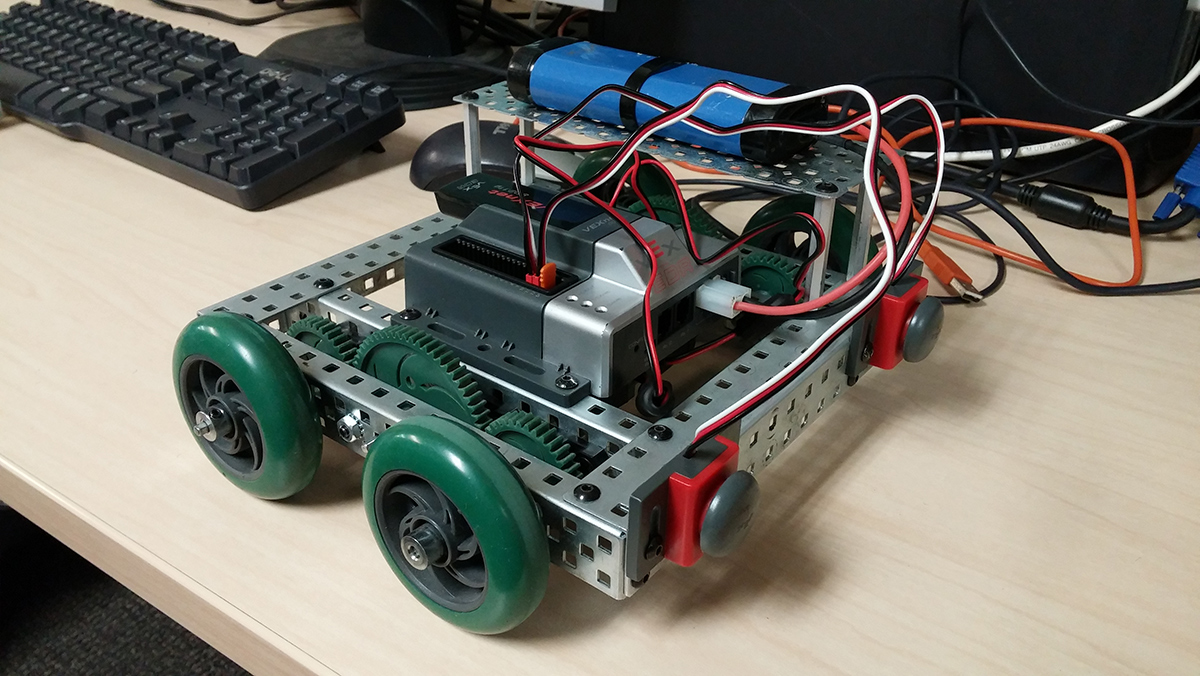
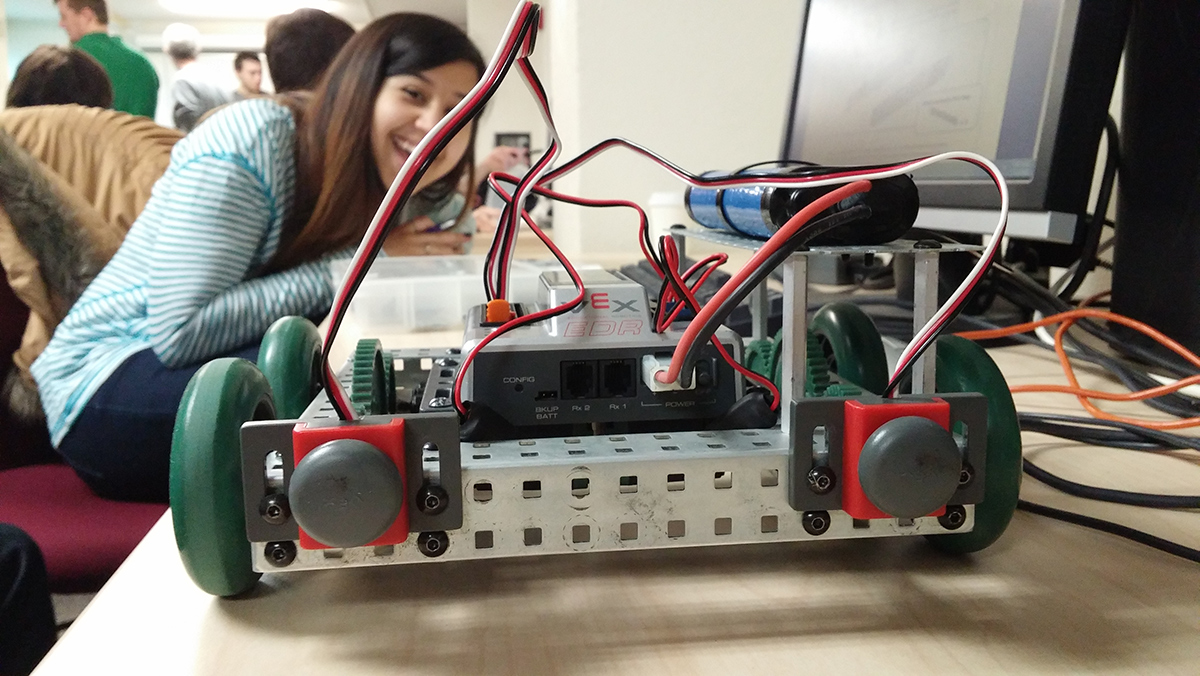
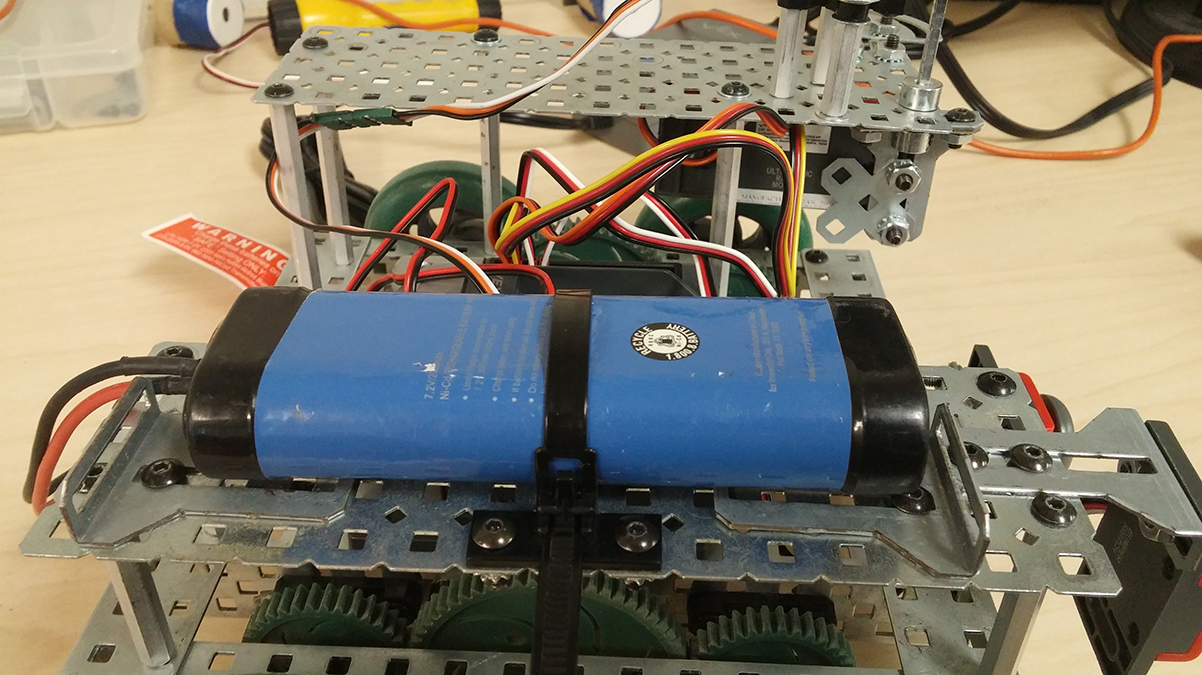
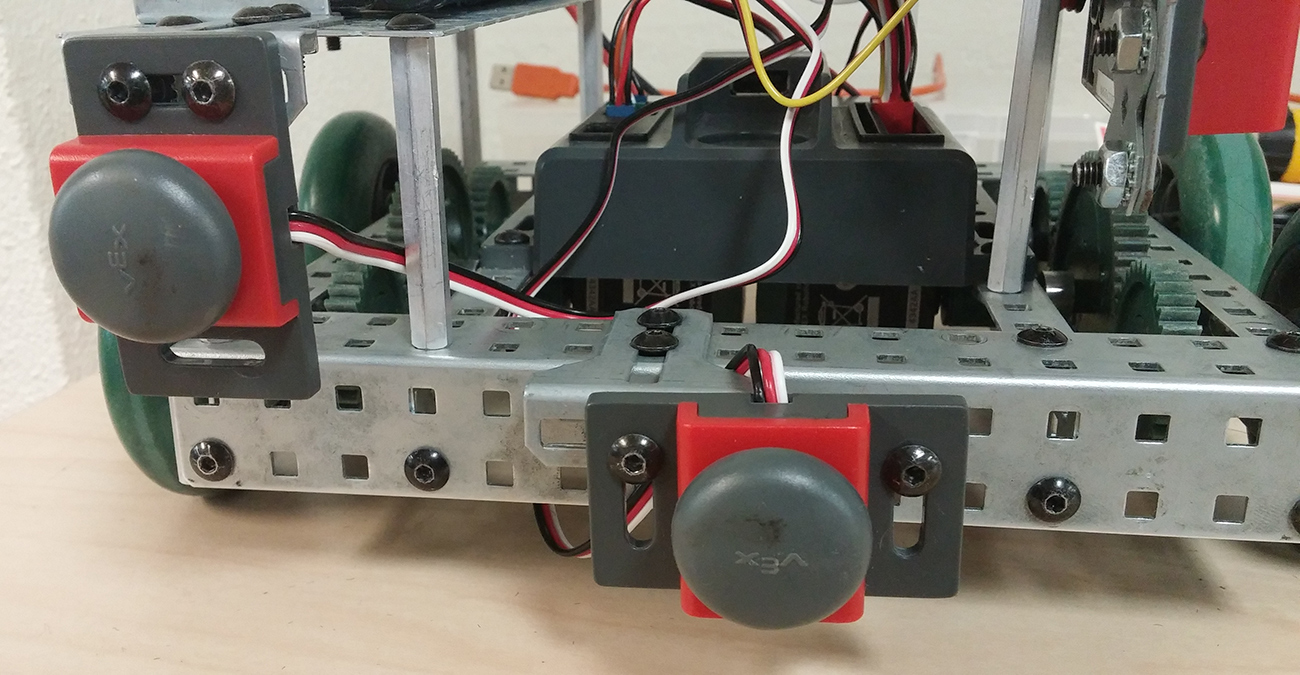
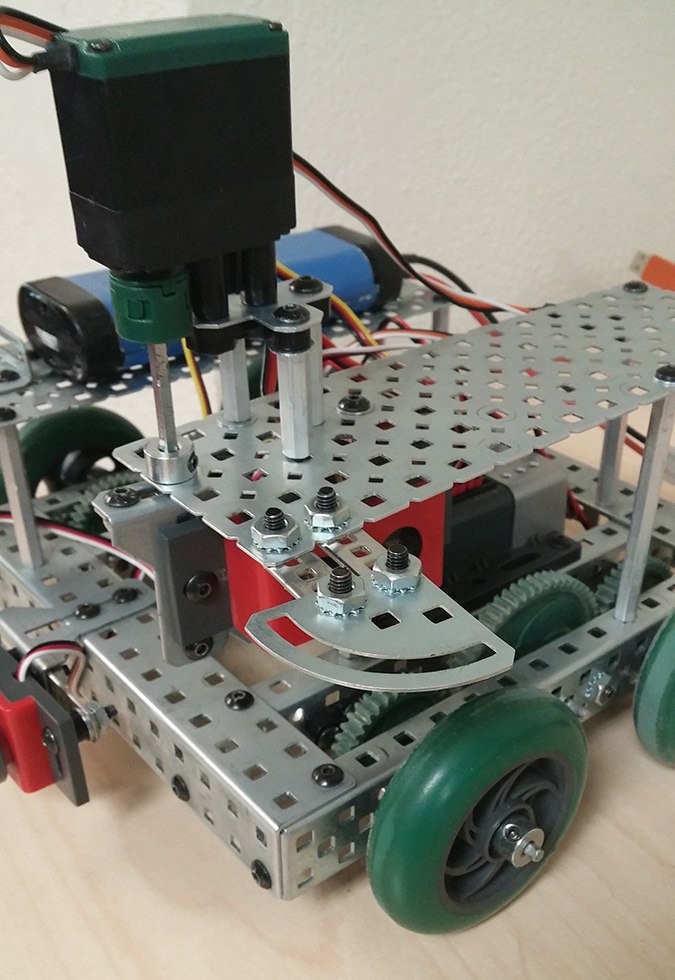
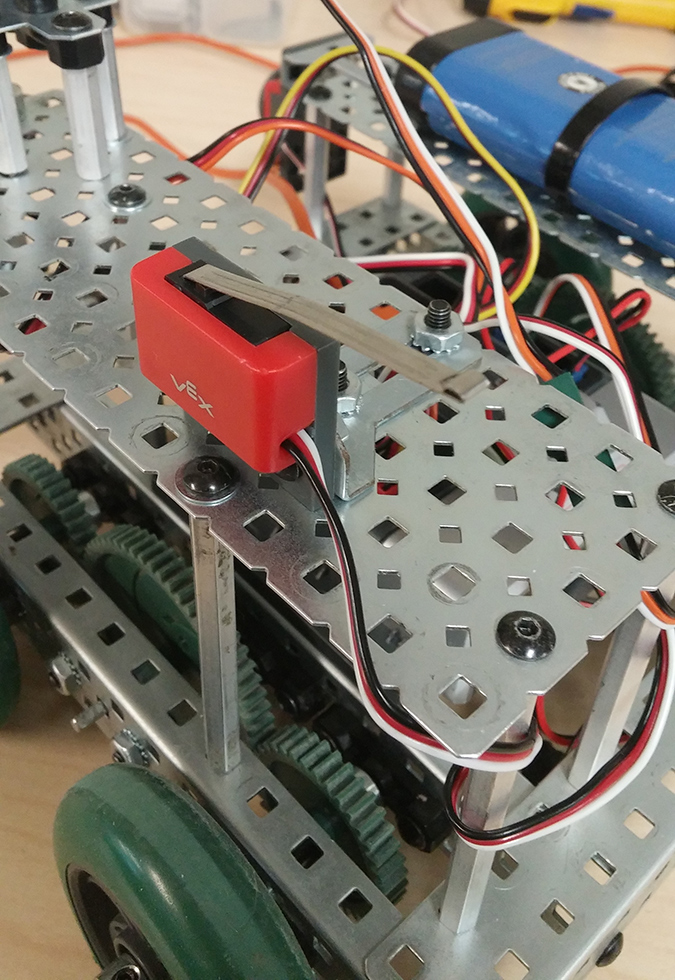
I took a basic course on robotics in 2015. We built simple machines with metal and pastic parts, including a microcontroller, gears, motors, servos, and a variety of sensors. We programmed the bots with RobotC.
Labs built up to two main tasks: maze traversal and inverse kinematics PID control. Below you can find a gallery of images I took while building our maze traversal bot. The ik bot can be seen in action here